Hardware
Hlavní deska (Main Board) je vybavena senzory, GPS modulem, rádiem, slotem na uSD kartu, stabilizátorem napětí, nabíjecím obvodem a signalizačními LED. Ovládá ji 32-bitový ARM mikroprocesor s nativním USB portem a větším počtem I/O pinů s HW periferiemi.
OpenCanSat kit je open-source. Kompletní design schématu i desky najdeš volně ke stažení v repozitáři na GitLabu
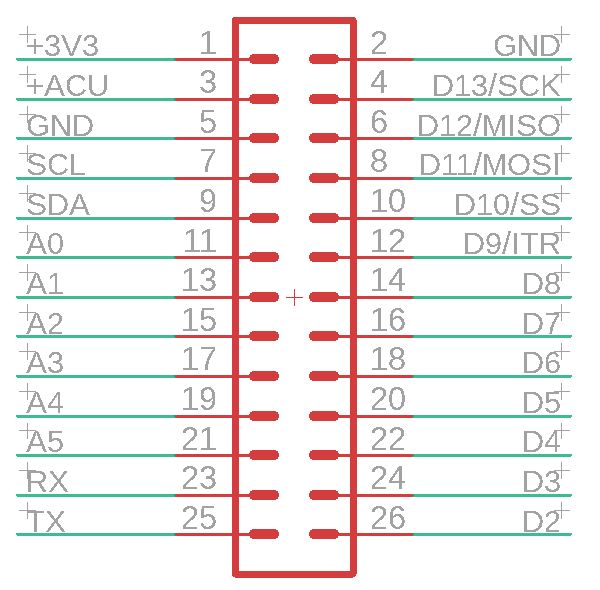
BUS konektor
Důležité signály a nevyužité I/O procesoru jsou k dispozici pomocí univerzálního konektoru, který se nachází na všech kulatých deskách v CanSatu. Můžeš ho využít k připojení dalších modulů nebo vlastních obvodů. Je to dvouřadá 26-pinová dutinka s roztečí 2.54mm, takže do ní můžeš připojit běžné propojovací kablíky které možná z náš z nepájivého pole, nebo různých modulů.
Senzory
Na hlavní desce najdeš zejména senzor BME280, který umí měřit teplotu, tlak a relativní vlhkost vzduchu. Pomůže ti splnit typickou primární misi.
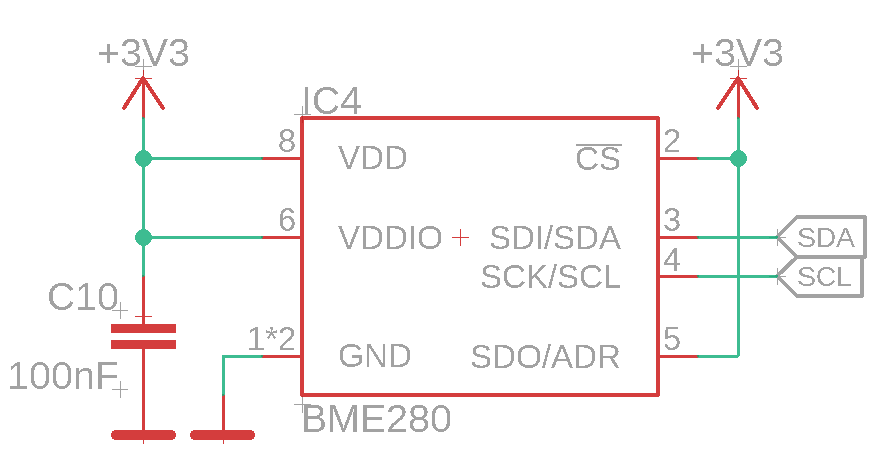
Další senzory a čidla pro sekundární misi můžeš připojit například pomocí sběrnic I2C, nebo SPI, které jsou vyvedené na BUS konektor.
Napájení
CanSat je napájený primárně z lithiového článku s kapacitou 550mAh. Ten je umístěný na napájecí desce (Power Board) a připojený přes 500mA PTC (vratná pojistka). Na hlavní desce se nachází nabíjecí obvod MCP73831, který akumulátor dobíjí z USB. K akumulátoru je připojený LDO stabilizátor MCP1826S, který poskytuje hlavní 3.3V napájecí větev pro jednotlivé komponenty na hlavní desce.
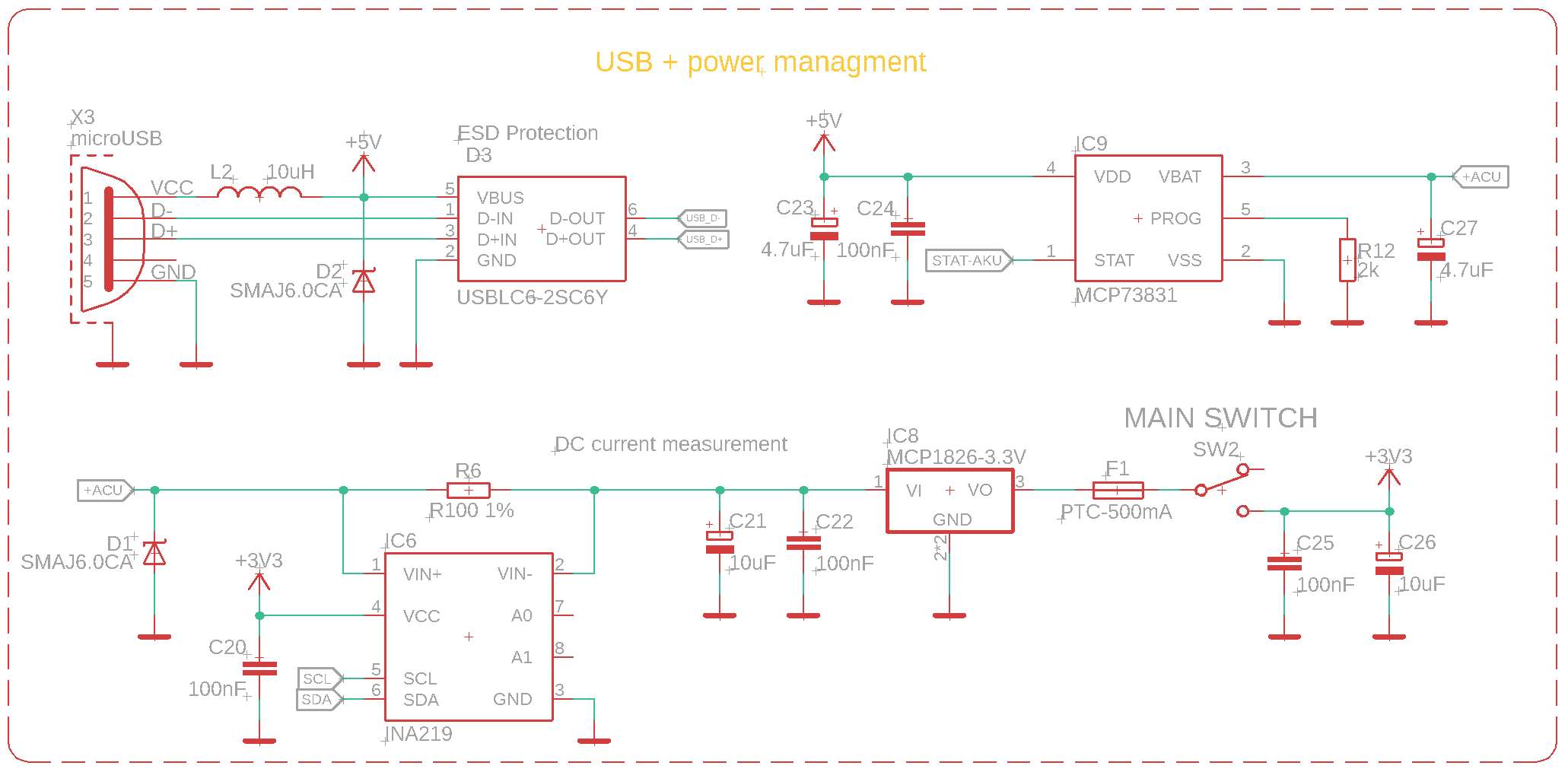
Před stabilizátor napětí jsme připojili senzor proudu INA219. Ten umí komunikovat s hlavním procesorem po I2C sběrnici a můžeš ho použít k real-time měření odběru celého CanSatu, včetně vlastních modulů (musíš je ale připojit na 3.3V větev).
Komunikace
Veškerou telemetrii a komunikaci s pozemní stanicí zajišťuje radiový modul RFM69HW. Ten umí vysílat v 433MHz ISM pásmu (bezlicenční). Na přijímací stanici se nachází identický modul; obě zařízení jsou schopná obousměrné komunikace (např. telemetrie jedním směrem, ovládací příkazy druhým směrem). Modul podporuje nastavení frekvence, výstupního výkonu a různé modulace signálu.
Dej pozor aby tvůj CanSat vysílal pouze na povolených frekvencích a nepřekročil požadavky pro bezlicenční provoz
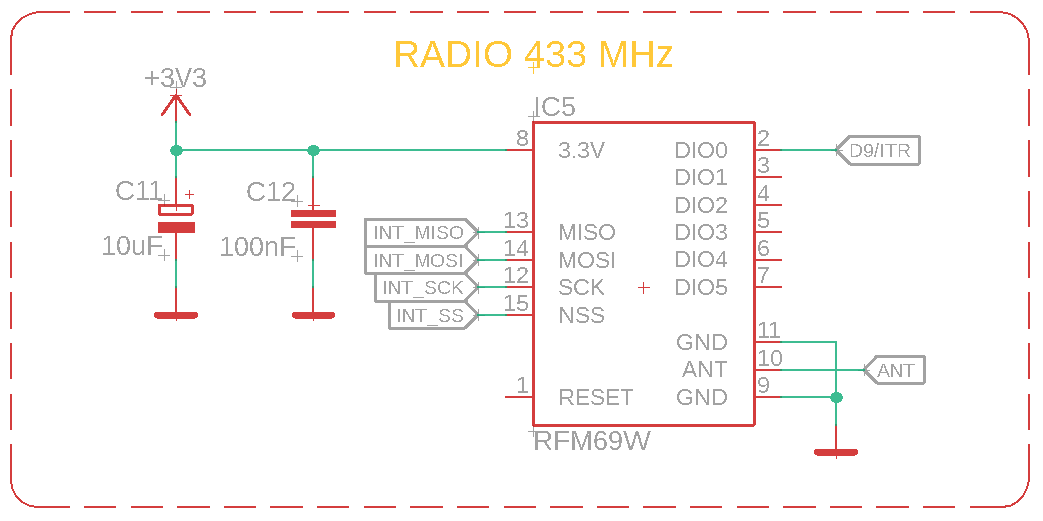
Jako anténu používáme λ/4 lanko s bílou teflonovou izolací. To by m�ělo být umístěné rovně kolmo k hlavní desce.
Navigační modul
Vedle rádia najdeš na desce ještě modul uBlox MAX-M8C, který umí přijímat signál ze satelitních systémů GPS, Galileo, GLONASS a BeiDou. Můžeš z něj tak získat polohu CanSatu - zeměpisnou délku, šířku a výšku, ale i velice přesné datum a čas.
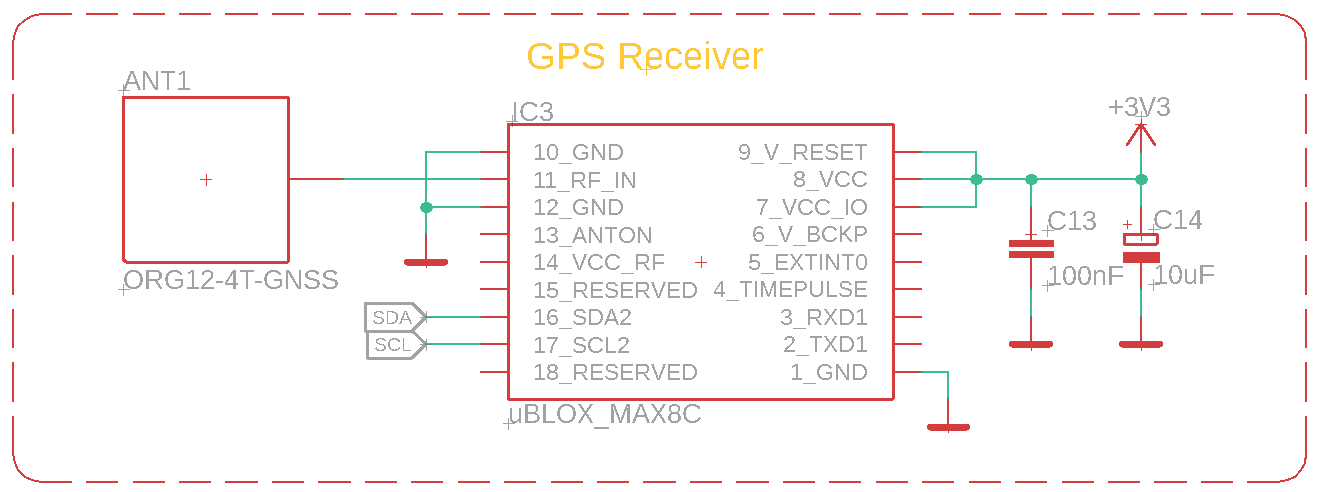
Na vrchní straně desky se nachází keramická GPS anténa, která potřebuje mít dobrý výhled na oblohu (satelity). GPS modul umí většinou nastartovat rychle, ale studené starty můžou trvat i několik minut. V husté zástavbě, kolem zdrojů rušení, nebo uvnitř budovy je možné že dostatečný signál nebude mít vůbec.
uSD karta
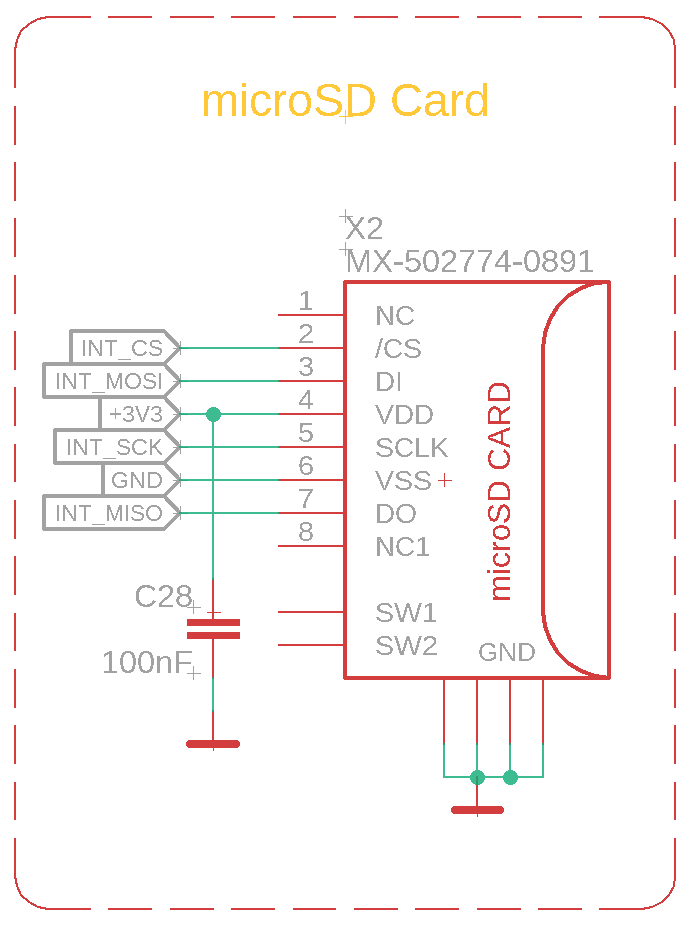
Kromě přenášení na pozemní stanici je také možné veškerou telemetrii zaznamenávat lokálně. K tomu slouží slot na microSD kartu.
MicroSD karet existuje spousta různých typů a druhů. Pro zaznamenávání telemetrie - občasné zapisování řádků s textem - není potřeba nic extra. Můžeš použít klidně malou a pomalou kartu. Arduino knihovny mohou mít problémy s velkými nebo speciálními kartami.
Rozšíření
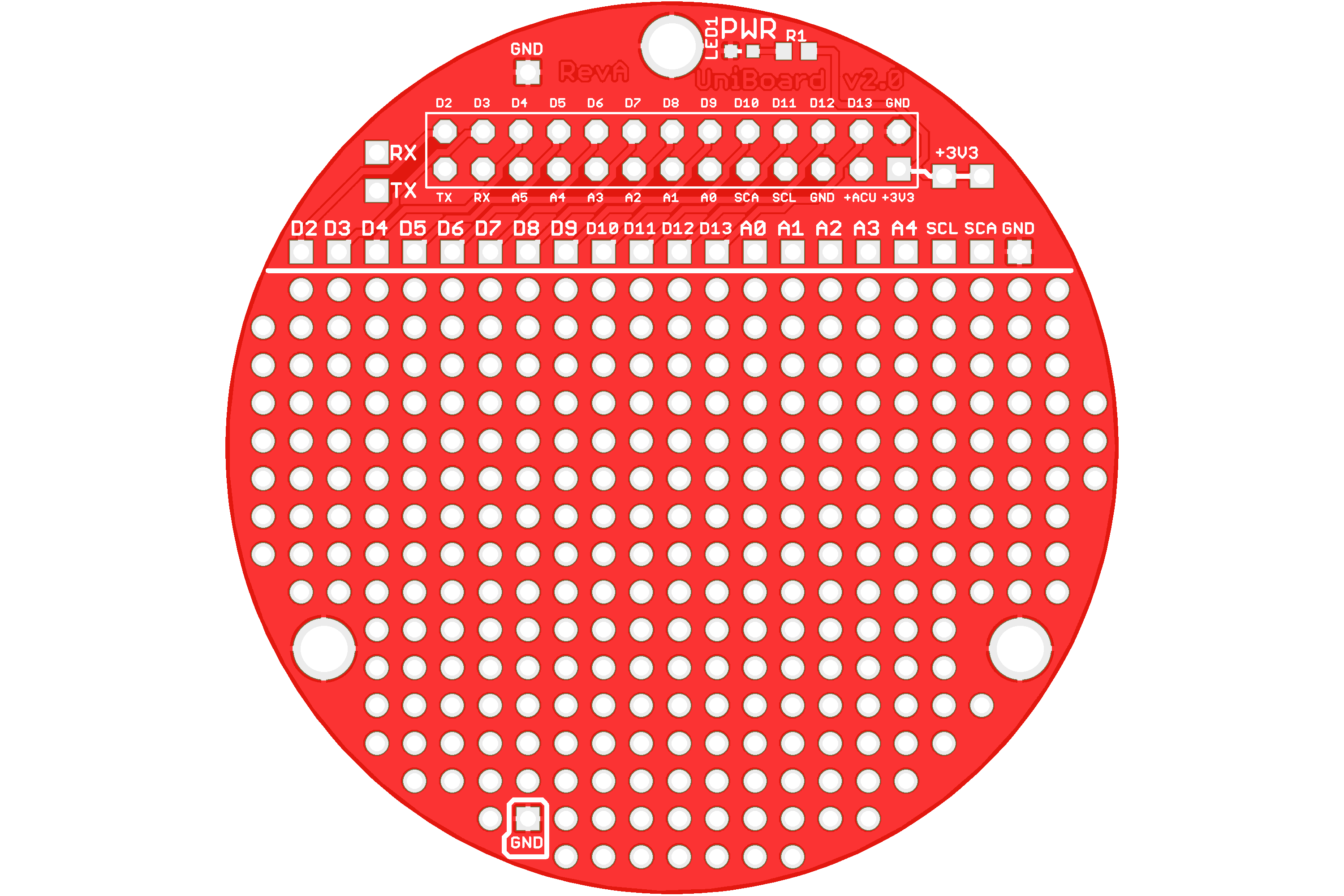
Další moduly a vlastní elektrické obvody můžeš připojit buď přímo do BUS konektoru, nebo použij jednu z prototypových desek (Uni Board). Najdeš na ní footprint (místo k osazení) BUS konektoru a z něj vyvedené signály na prokovené pájecí otvory (vias / prokovy). Zbytek desky je pokrytý samostatnými, nikam nepřipojenými prokovy se standardním rozestupem 2.54mm. Můžeš do nich připájet různé moduly, kablíky, nebo samotné elektronické součástky.
Přijímací stanice
Na pozemní stanici (Base Board) najdeš většinu komponentů z hlavní desky CanSatu. Zapojení je stejné jako na hlavní desce. Napájená je dokonce ze stejného akumulátoru a má také identický BUS konektor pro připojení dalších modulů.
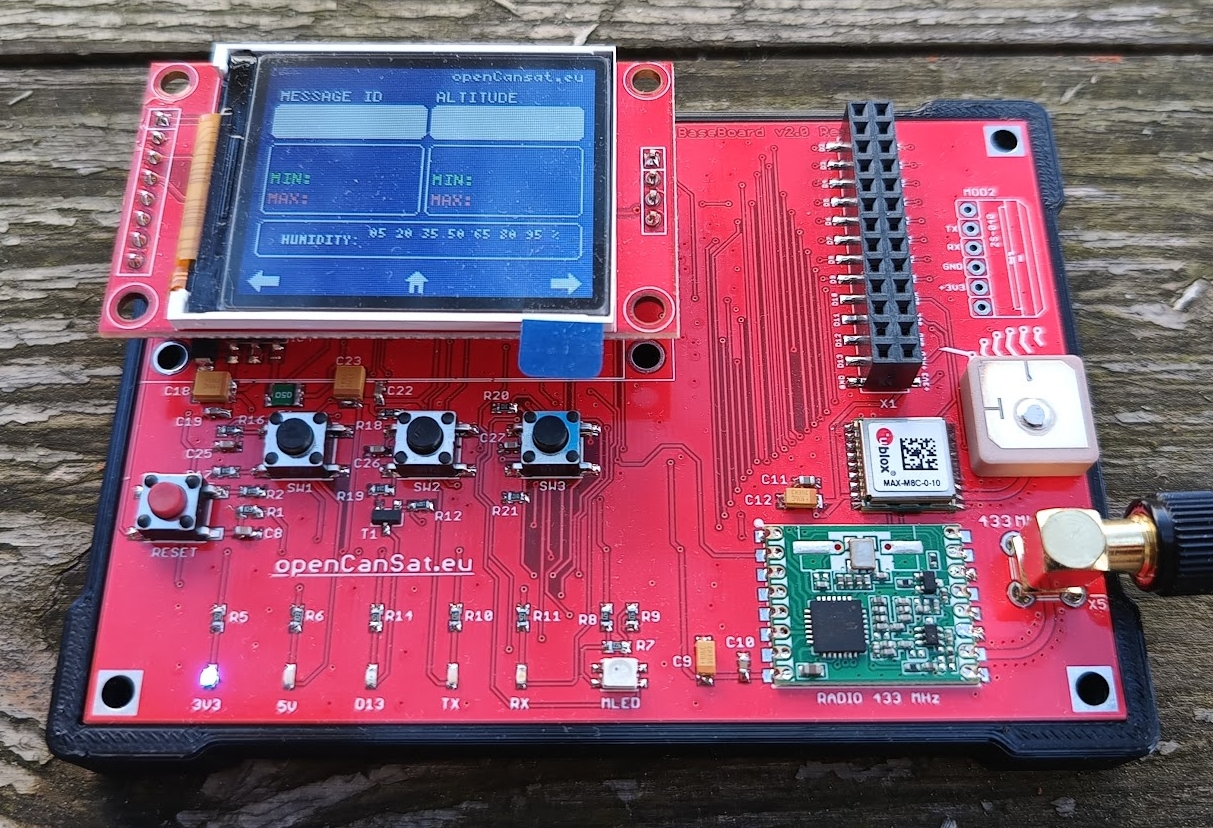
Oproti hlavní desce tu najdeš navíc několik tlačítek a LCD displej. Můžeš je použít např. k zobrazování telemetrie, nebo vzdálenému ovládání.